株式会社東栄 磁気応用部
サイトはこちら
磁気の話のはじめに
1.電荷と磁荷
2.磁気モーメントと磁性材料
3.反磁界と磁化特性
4.強磁性体
5.軟磁性材料
6.磁性材料と高周波
7.微粒子材料
8.磁気の計測
9.スピントロニクスについて
補足Ⅰ 多層膜の軟磁性
補足Ⅱ 薄膜インダクタ
補足Ⅲ 微粒子の透磁率
補足Ⅳ も一度反磁界
参考文献
磁性材料・磁気工学入門
© 2019 Yutaka Shimada
ここでは、磁界計測と、磁性材料の磁気的性質の計測法の概略を説明します。かなり古典的な内容になります。
1. 磁界計測(磁気センサー)
1-(1) コイル
Cu線等をループ状にした、単なる空芯コイルですが、これが意外に使いやすい磁界センサーになります。H =H0sinωt の交流磁界が、面積S,巻き数Nのコイルに入ると、
e = NS dφ/dt = -NS μ0ω cosω t (8-1)
となるから、低周波では使いにくいですが、周波数が高くなると感度が上がり、このような簡単な計算で磁界強度を知ることができます。しかし、さらに周波数が上がると、巻き線間の電気容量が効いて来るので、コイル自身でLC共振が起こり周波数に限界があります。また、そこまで行く前に、巻線間の高周波電位差が、磁束変化による信号に混じりこむことになります。これを克服すべく作られたのがシールデッドループコイル(shielded loop coil)です。この形は高周波磁界のセンシングには極めて有効で、磁界型アンテナとしてさまざまな形が提案されています。図8-1はその例です。
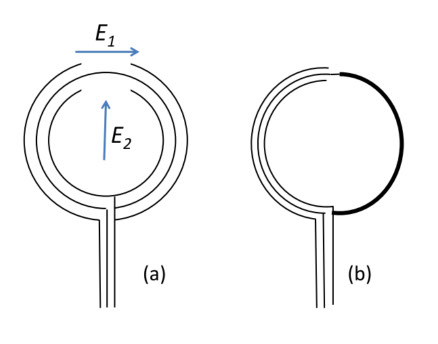
図8-1
要するに、信号線をアース被服して巻線間に発生する電界から隔離し、一方、磁束変化には反応する方法です。(a)では、信号線がアース線で被覆されていて、一部が露出することで磁束変化には感応する形になっています。しかし、右側の信号線はアースに落ちているので、(b)のように一まとめにしてアース線一本にしてもいいわけです。このコイルは手作りで簡単に作れるので、様々な工夫がされています(「磁界型アンテナ」で検索)。さらに、薄膜化して微小なセンサーにしたものが、図8-2です(参考文献8-1)。横幅は0.1~5mmで、10GHzの少し上くらいまで使っています。
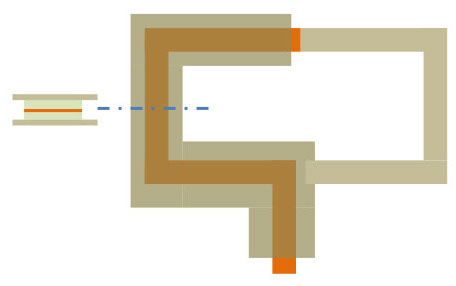
図8-2
ただし、図8-1(a)に示したように、電界 E1 には感応、E2 には不感となります。従って、電磁波の電界が E2 方向になるようにコイルを配置できれば、最も正確な高周波磁界測定ができます。このコイルは、受信アンテナ(磁界アンテナ)だけでなく、薄膜にすることで、薄膜透磁率測定装置のセンシングコイル(参考文献8-2)、また、第7章のマイクロ波帯電磁ノイズ計測にも使われていて、実際に感度較正のできる専用のプローブ素子が市販されています(参考文献8-3)。
1-(2) ホール素子
半導体のキャリアが磁界中で作る電位差から磁界強度を測定できます。磁気センサーとしては教科書的、基盤技術的な位置にあり、現在は、ガウスメーターのプローブ、GPS用地磁気センサーとして使われています。ホール素子の原理を理解するのに磁性材料の知識は要りませんので、(参考文献8-4)などをあたってください。素子に流す直流電流と磁界感度には直線性があり、非常に広範囲の磁界( 1~105A/m )に対応できますが、周辺回路の問題もあり周波数は数 100KHz 以下に留まります。最近は、GPS用地磁気センサーとして下記のAMR素子と競合し、基盤技術としての強さを発揮しています。
1-(3) AMR(Anisotropic Magneto-resistance)
これは、磁性薄膜の特別な機能(AMR、異方性磁気抵抗効果)を使う磁気センサーです。図8-3は、パーマロイ薄膜(Ni80Fe20)の電気抵抗を縦軸に、磁化の容易軸からの傾き θ を横軸にしたときの磁気抵抗効果です。
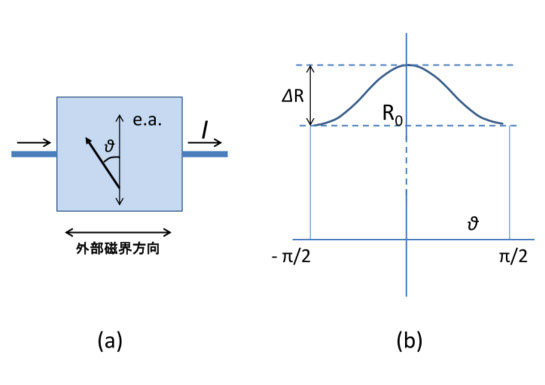
図8-3
外部磁界は、磁化回転を起こす困難軸方向に印加します。この効果は、Ni-Fe、Co-Ni、その他の特定の合金組成のみに見られる現象で、それをわかりやすく説明するためには、参考書を読み直し、金属磁性体のバンドモデルから解説を始めることになるので、ここではご勘弁ください(バンドモデルについては、次の章(スピントロニクスについて)で準備中です)。パーマロイ(Ni80Fe20)のAMRは、軟磁性と共存していることに、工学的な価値があります。パーマロイ薄膜のAMRによる電気抵抗の変化 ΔR/R0 は、最大で3%程度ですが、ΔR を大きくして感度を高めるために短冊状に並べて直列に連結して使うのが普通です。電気抵抗の変化を検出するだけなので、構造が簡単でノイズが入りにくく、サイズ低下が容易で、現在は、GPS用の地磁気センサー(つまりスマホの地図情報での自分位置表示機能)、磁気エンコーダー(参考文献8-5)として広く応用されています。さらに最近では、超小型の薄膜電力センサーの開発も行われています(参考文献8-6)。磁化回転を利用しているので、第5章で触れたように周波数特性は抜群です。今は下火になりましたが、20年くらい前には、このパーマロイ薄膜がハードディスクに記録した信号(数100MHz以上)を読み出す磁気ヘッドとして、ハードディスクの記憶容量の飛躍的増加に大活躍をしました。また、磁気抵抗効果のその後は、実に華々しい発展を遂げています。AMRに代わって、GMR(Giant magneto-resistance)(参考文献8-7)、TMR(Tunneling magneto-resistance)(参考文献8-8)が発見され、現在の ΔR/R0 は数100%にもなっていて、磁気ヘッド、磁気センサー(参考文献8-9)ばかりでなく、エレクトロニクスと磁気工学の分野で画期的な innovation になる可能性を持っています。これについては、次章の「スピントロニクスについて」で触れます。
1-(4) MI(Magneto-impedance)効果
これは、金属軟磁性材料の表皮効果を使っています。表皮効果とは、Cu のような伝導体に高周波電流を流したときに、電流が導体の表面に偏り、高周波電流に対する電気抵抗が高くなってくる現象です。図8-4は、直径1mmの Cu 線に縦方向に高周波電流があるときの、導線内の電流分布です(参考文献8-10)。周波数が高くなると、分布が急峻になり、電流は表面に偏ります。
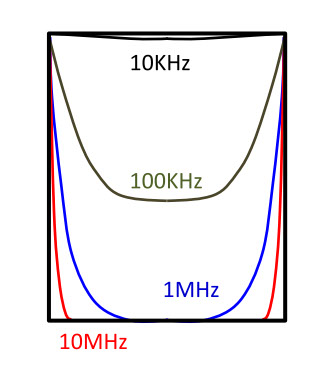
図8-4
この偏りの程度を表すために、表皮の厚み(δ)が定義されています。表面、表面から深さ d の電流密度を J0、J(d) とすると、
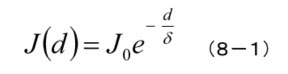
ここで e = 2.718(ネイピアの定数)。δは、電流密度が表面から1/e(36.8%)になる厚みになり、
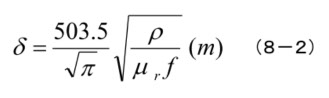
Cuは、ρ=1.72x10-8Ωm, μr = 1 なので、cmで表すと、
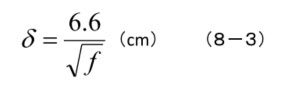
f=1MHzの時は、δ = 66μmになり、1mmφ 程度のCu線では表面しか電流がないことになり、直流の電気抵抗に比べて非常に大きい電気抵抗になります。表皮効果の正確な説明は意外に面倒くさいので、ここでは省略しますが、要するに、電流が作る高周波の磁束がさらに電界を誘起し、その電界はもとの電圧と反対方向になる。その電界は導体の中心に行くほど強いので、中央部では電流が減る、となります。なお、対策として、直径数10~数100μmの細い線を束ねたリッツ線、表面積を増やした平板,薄膜の導体(プリント基板はこれ、とも言える)、さらに高い周波数帯では、導線自体にあるインダクタンス、キャパシタンスを設計に入れて、特性インピーダンス(参考文献8-11)を標準値(50Ω)に設定した、マイクロストリップ線路、コプレーナー線路(参考文献8-12)というのがあります。
MIセンサーは、金属軟磁性材料の表皮効果を利用します。パーマロイ、アモルファス合金ではμr が非常に高くなり、また図5-7のように外部磁界に敏感になります。つまり、外部磁界によってμr が変わり、(8-2)の関係から、δが変わって電気抵抗が大きく変化します。軟磁性材料に適当な周波数の高周波電流を流して置くと、磁界によってその電気抵抗が変わる、というわけです。その変化は、適切な周波数の電流と軟磁性体の形(断面)を選べば数100%になり、文句のない高感度ですが、高周波電流が感度の基準になっているので、ホール素子の直流電流と同じく、外部回路の組み込み精度が重要になります。実際には、アモルファスの軟磁性合金のワイヤ(参考文献8-13)(溶融合金を水中に吐出して急冷すると直径数10~数100μmの軟磁性細線ができる)に高周波電流を流すことで、高周波電気抵抗が外部磁界に敏感になり、弱磁界のセンサーとして有効です。このアモルファス細線を使ってチップ化したものが市販されています(参考文献8-14)。
1-(5) GIG(Gap in Granular)
次の章で予定しているTMR(トンネル磁気抵抗効果)が第5章のグラニュラー膜でも見られることを利用した磁気センサーです。グラニュラー構造中の「トンネル磁気抵抗効果」は、非常に強い磁界中で起きるので、弱い外部磁界をパーマロイなどの軟磁性薄膜を介して局所的な強磁界にして、これをグラニュラー膜に印加し、電気抵抗変化を検出するという方法で、グラニュラー構造の電気抵抗は非常に高いので、低消費電力(低電流)が特長です(参考文献8-15)。
1-(6) フラックスゲート
高透磁率材料を使った古典的な方法ですが、室温で安定、安価、微弱磁界用(測定範囲 10-4~10-10 Tesla)で、意外に広く使われています。原理的に異なるタイプがいくつかあり(参考文献8-16)、大別して、平行型(被測定磁界Hextと駆動磁界が同方向)と直交型(被測定磁界Hextと駆動磁界が直交)があります(参考文献8-17)。図8-5の(a)、(b)は平行型、(c)が直交型です。
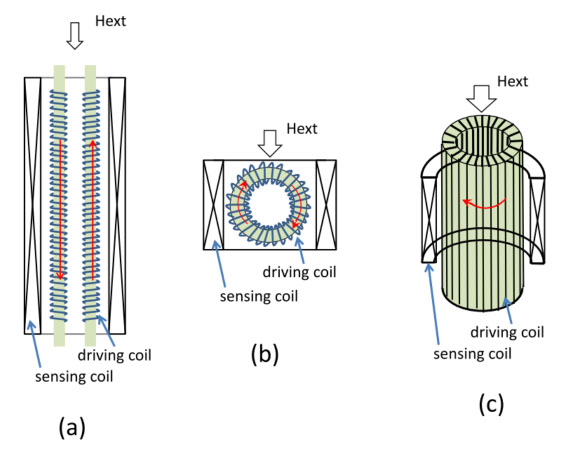
図8-5
平行型では、磁心の磁化(赤矢印)が、Hext に対して平行に大振幅磁化反転(正の飽和⇔負の飽和)を繰り返しています。(a)では二つの磁心、(b)では左右のそれぞれの部分の磁化過程を考えると、Hext だけ正負のバイアスのかかった磁化曲線になり、その差が sensing coil に電圧として誘起されます。これが意外に高感度になるのです。その詳細は、ここでは省略しますので、興味ある方は、(参考文献8-18)などを読んでください。
(c)では、大振幅磁化反転の方向と sensing coil が90°になっているので、何も起こらないように見えますが、図8-6のような簡単な構造にして見ると、やはり Hext に対して非常に敏感な誘起電圧があることがわかります。図8-6では、(c)の磁心を一軸磁気異方性がきちんと形成された薄膜に置き換えます。この薄膜では、駆動磁界がゼロでは、磁化が互いに反平行を向いた二種類の磁区に分かれています。これを単純化して(a)のように表しておきます。
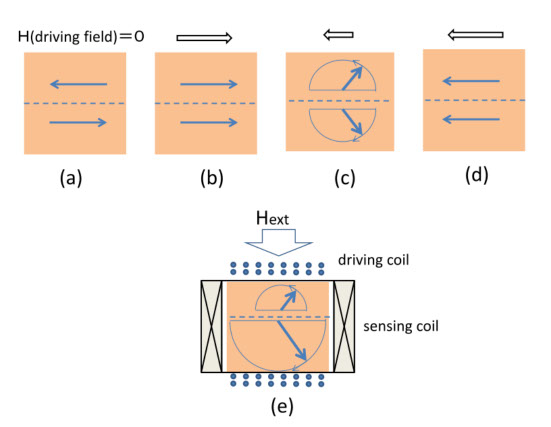
図8-6
これに駆動j磁界(⇒)を加えて飽和させたのが(b)で、そこから駆動磁界を反転させる、通常は第5章で触れたように磁壁移動によって磁化反転が起きますが、(b)から(c)の駆動磁界を、磁壁が動けないくらいの速さ(周波数で言えば数MHz以上)で反転させると、(c)にあるような高速の磁化回転が起きます。この時、(c)では、時計回りと反時計回りで磁化回転が起きますが、その分量は、ほぼ1対1です。この時(e)の検出巻線には何も出力電圧がないですが、(e)の白い矢印で示したような被測定磁界Hext があると、時計周りと反時計回りの比率は大きく変わり、検出巻線には大きな出力が出ます。この比率が Hext に敏感な理由は、もともとの水平方向に容易軸がある異方性磁界 Hk に対して、90°方向に被測定磁界があるので、磁化の方向が容易軸方向からわずかに時計回りの角度を持った初期状態から磁化反転が始まるためです。理論的には、この時のまわり方は、被測定磁界がどんなに小さくても、全部が時計回りになってしまうことになりますが、現実には試料形状のゆがみや磁気異方性の分散(試料ないで場所によって磁気異方性の強さや方向に揺れがある)があるので、反時計回りもあり、白い矢印の強さの増加に伴って(d)のまわり方の差が大きくなる、というわけです。
図8-6の薄膜方式は、超高感度磁気センサーとして過去に真面目に研究され、論文もいくつか発表されていますが、この方法の発展形で、銅線にパーマロイ薄膜を電着した方式が、微弱磁界の測定器として実用化されています(参考文献8-19)。
微弱磁界のセンサーは、SQUIDが群を抜いていますが、冷却システムなど周辺機器の規模が大きく、使い回しは不便です。フラックスゲートはその点に優位性があり、応用範囲が広がっています。環境磁気、磁気探査(参考文献8-20)、 磁気シールド、宇宙探査、移動体検出、不純物検出、電流計測、などです。
2. 磁性体計測
2-(1) B-H 曲線
図8-7は、B-H 曲線(B-H ループ )測定の典型例です。
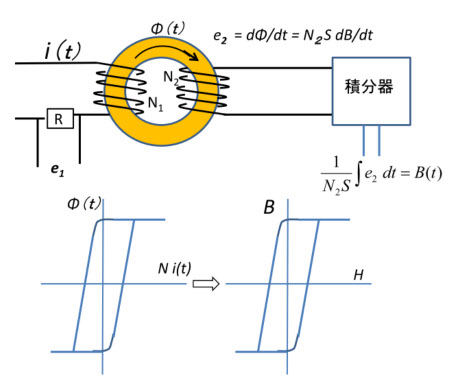
図8-7
測定試料は、基本的に反磁界(第3章)の心配のないコア型、または、実用上B-Hに故意に傾斜を持たせたギャップ入りコアで、一次巻線で N1x i (t)の起磁力(N1x i (t)/2πr = H(t) で印加磁界になる)を加えると、試料内に磁束変化φ(t)が生じ、二次巻線には、図中の電圧eができるので、これを積分回路で時間積分すると、B(t) がわかります。積分回路は、外部ノイズも積分してしまうので安定性が問題で、現在は、電圧eをPCに取り込んで数値積分しています。また、i(t)は、容量の大きい定電流電源でないと sine波形にはならないので、Rを直列にいれて、e1/R = i(t) から直接測定します。なお、Nx i による起磁力は、空間のμ0による磁束も作るので、e2 から引き算すべきですが、試料の断面積とμが圧倒的に大きいので、無視する場合が多くなります。
B-Hループが作る面積は、試料の損失)になるので、この面積を計算し、その周波数、外部磁界振幅による変化を見ると、その材料が使える周波数上限が見えてきます。図6-2のデータは、この方法で得られたもので、コア試料評価装置も市販されています。(参考文献8-21)
薄膜が試料の場合には、コイル面積に比べて試料断面積が小さくなり、空間の磁束は無視できないので、図8-8のような形になります。同形の検出コイル2個を均一な磁界 H(t) 中に置き、位置や方向を微調整して誘導電圧をゼロにした後、試料をその一個に入れて e2 を測定します。あるいは、一個のコイルのみで、空芯状態で e0 を測定した後、試料をいれてet として、e2 = et - e0 とします。PCをつなげば簡単にできるので、現在は、この方法です。
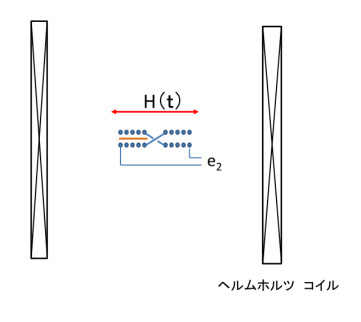
図8-7
このような測定法の注意点は以下です。
1. 図8-7のコア測定は、コアのインダクタンスが大きくなるので、コアのサイズが大きいと、飽和するような大振幅励磁電流 i (t) を作るのに高電圧が必要になります。おおざっぱに言えば、直径2~3cmのコアでは10KHz位まで可能ですが、数100KHzになると e1 は1KVを超えてしまいます。コアのサイズを小さくすると、その問題は緩和されますが、開口部が小さくてN1、N2 を十分に増やせなくなり、無理に詰め込むと巻線間容量が大きくなり、やはり周波数に上限があります。一つの対策として、直径数mm以下のコアについては、N1 だけにして、e1 のみから起磁力、φ(t) を算出する方法によって、数100KHz~数MHzのB-H測定が可能ですが、検証実験はまだ十分ではなく、実用測定システムの構築は今後の課題です。
2. 図8-8では、起磁力源が大サイズのヘルムホルツコイルなので、空芯インダクタンスが大きく、磁界と周波数に限界があり、普通は100Hz, 8KA/m 程度です。また、薄膜といえども、数μm以上に厚くなると、反磁界が問題になるので、検出コイルよりも十分に長い試料が必要です。
以上がB-H ループ測定法ですが、大振幅磁化反転に十分な駆動磁界を発生させるのは、MHz以上の高周波では困難です。しかし、微小な振幅で済む初透磁率測定にすると、駆動磁界は1A/m以下になり、また e2 は周波数が高いほど大きくなるので、ずっと楽になります。都合のいいことに、MHz以上の磁気素子は小振幅の信号の伝達、処理に使われるので、これ以上の周波数帯での磁性材料の機能性は、大振幅特性よりも初透磁率の情報が重要になります。
2-(2) 透磁率測定
基本的には、図8-7,8-8の磁界の振幅を小さくして測ればいいのですが、周波数が上がると、試料は自ずと薄膜になり、巻線自体のLとCが無視できなくなるので、一次と二次の巻線の形態が違ってきます。10MHz~数GHzでは、図8-9のように、一次巻線は平行平板、二次は1ターンのコイル(赤線)になります。
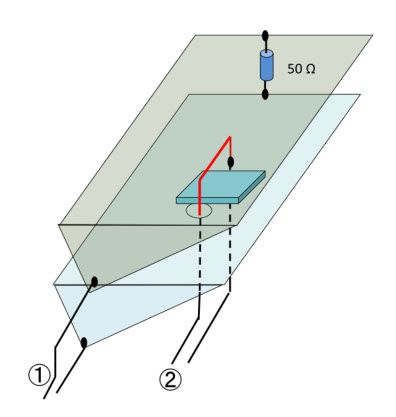
図8-9
高周波では、導線自体のインダクタンスと、導線と周辺(接地導体)との間にあるとキャパシタンスが無視できなくなり、有効な電力を終端まで送るためにはインピーダンス・マッチング(参考文献8-22)が必要になります。図8-9では、①の導入線路(同軸ケーブル)と平行平板の特性インピーダンズ(平板の中の電界と磁界の比(E/H))(参考文献8-23)を50Ω、また、終端で電流を消費する抵抗素子を50Ωにすると、最も大きい電磁波エネルギーが抵抗素子に到達します。と言っても、①と②は、ネットワークアナライザにつながっていて、薄膜試料に加わる磁界は 1A/m 以下で、初透磁率しか測れません。二次の1ターンコイルは、幅5mm、高さ1mm程度の小さなものですが、そのままでは数GHzでLC共振を起こすので、図8-2のシールデッドループコイルを使うと、さらに高い周波数まで上限が伸びます。これを使った透磁率測定器が開発され、市販されています(参考文献8-24)。さらに、平行平板の間に薄膜試料を差し込み、導通状態をSパラメーターで測定すると、試料の透磁率 μ’ と損失 μ” を算出できます。これも測定システムとして作られていて、市販されています(参考文献8-25)。
ただし、図8-7のコア形状では気にならなかった反磁界を、図8-8,8-9では考慮する必要があります。第3章の反磁界補正法を使うか、薄いという理由で無視するか、あるいは、十分に長い試料に均一な駆動磁界がかけられるようにして、中央部の透磁率を測定する(要するに、反磁界を無視できるようにする)、などの対策があります。実際には「薄膜だから反磁界は無し」と割り切って測定、発表している場合もあります。が、第3章の補正法からわかるように、数μm以上の厚みになると反磁界は無視できないはずで、ちょっと頼りないデータも見かけます。
2-(3) 磁化の強さの測定
復習しますが、「磁化の強さ」とは、「単位体積中の磁気モーメント( Bohr magneton )の数」です。そこから出てくる磁束の量を測定して、単位体積に換算します。磁化の強さの測定は、図8-7のBーH曲線から飽和磁化、つまり試料の磁化の強さを算出できますが、通常は、試料振動型磁力計(VSM、Vibrating Sample Magnetometer)を使います。VSMは、直流測定しかできませんが、非常に広い範囲の磁化を、強弱様々な磁界中で測れるので、磁性材料研究、生産管理には不可欠の計測器です。図8-10はVSMの原理です。
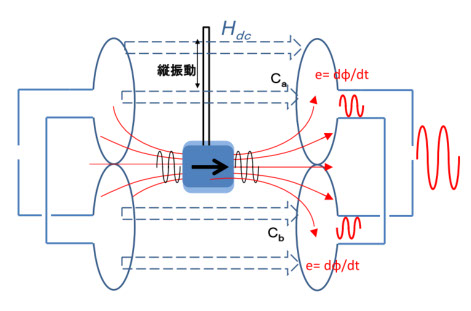
図8-10
中央の試料は、電磁石またはヘルムホルツコイルによる均一な磁界(Hdc)中にあり、縦方向に機械振動している支持棒に取り付けられています。普通は、振幅が約100μm、周波数は約100Hzくらいです。試料が振動するので、試料から出る磁束も振動し、その時間変化が二つの検出コイル Ca 、Cbに電圧として検出されます。Ca と Cb への磁束の増減は正負逆方向になるので、出力が足し算になるように直列接続すると、2倍の電圧になります。反対側にも同型の検出コイルがあり、これも足し算されます。一方、広い範囲に分布する Hdc は、Ca、Cb に対し正負同方向なので、仮に動的ノイズが含まれていても、出力には出ません。つまり、試料から出る磁束のみを検出できるのが VSM の特徴で、外部磁気ノイズを気にしないでコイル巻数を数1000回以上にし、またこの振動を参照信号としてロックインアンプで増幅して高感度が得られます。現在では、サイズが5mm角、厚みが1原子層くらいの Fe 膜でも、その磁化曲線を測ることができます。大きい試料サイズの方は、試料が磁極に引き付けられて試料棒の縦振動に変な横振動が入るのが限界で、試料棒の強度、加振機構の強さによって変わります。また、試料の温度をヘリウム温度(約4K)から1000℃近くまで変化させることもできます。
以上のやり方では、試料から出てくる全磁束量を測っているわけではないので、標準試料を使います。厳密には、標準試料の形とサイズは被測定試料と同じにします。これは磁束の分布が同じでなければ検出コイルが同じ感度にならない、という理由からですが、実際には、被測定試料、標準試料の大きさに比べて検出コイルの間隔が大きければ(例えば、試料サイズが5mm2、コイル間隔が30mm以上)、あまり大きな誤差にならないので、ほぼ同じであれば気にしない、という場合もあります。なお、試料のサイズ、形状とコイル出力の関係は厳密に計算できますので、こういう誤差は精確に知ることができます。
VSMは、基本的な測定機として古くから使われてきて、数多くの製品があります。(「VSM」または「試料振動型磁力計」で検索してください)。また、試料の振幅を大きくしたもの(参考文献8-26)、さらに振動数を10倍以上に高くし、コンパクトで低価格にしたもの(参考文献8-27)などが開発されています。
以上が一般的な計測法ですが、磁気、磁性材料の計測の極く一部です。これ以外に非常に多くの方法が使われ、また現在も発展しつつあります。ここでは、それら全てに言及するには、不勉強のうえに気力が続かないので、今回は名称のみ記して、またの機会に追加することにします。
興味ある方は、以下を検索してください。
磁歪、磁気ー光効果、強磁性磁気共鳴(FMR)、核磁気共鳴(NMR)、電子スピン共鳴(ESR)、SQUID、磁気力顕微鏡(MFM)、走査電子顕微鏡(SEM)、X線磁気円二色性、
スピン偏極陽電子ビーム、放射光
▲ページ上部へ